スマートフォンをワイヤレス慣性測定ユニット(IMU)に変えます。
このアプリは、CSV(Comma分離値)としてUDPを介して携帯電話の慣性センサーからネットワーク内のコンピューターに測定値を送信します。
これにより、携帯電話がワイヤレス慣性測定ユニット(IMU)に変わります。
次のセンサーがサポートされています。
- 加速度計
- ジャイロスコープ
- 磁力計
携帯電話にこれらすべてのセンサーがない場合、使用可能なセンサーデータのみが送信されます。
例UDPパケット:
890.71558、3、0.076、9.809、0.565、4、-0.559、0.032、-0.134、5、-21.660、-36.960、-28.140
Timestamp [sec]、sensorid、x、y、z、sensorid、x、y、z、sensorid、x、y、z
センサーID:
3-加速度計(m/s^2)
4-ジャイロスコープ(rad/s)
5-磁力計(Micro -Tesla UT)
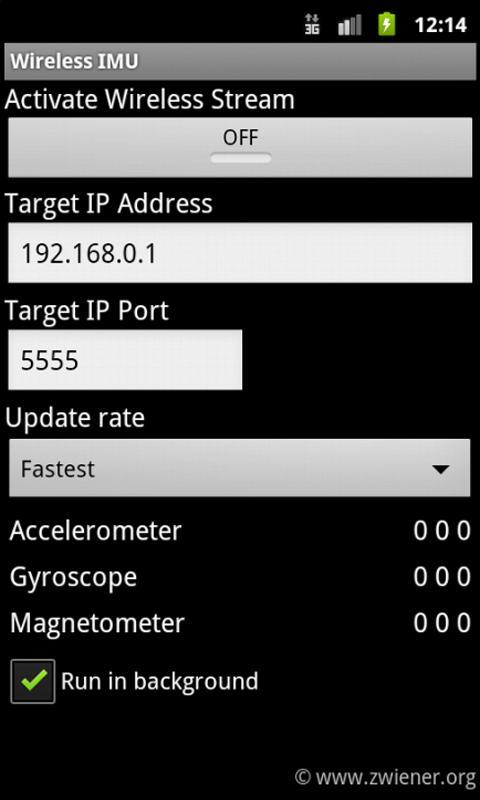
このアプリをバックグラウンドで実行できます。
WiFiネットワークに接続されていない場合、警告ダイアログが表示されます。
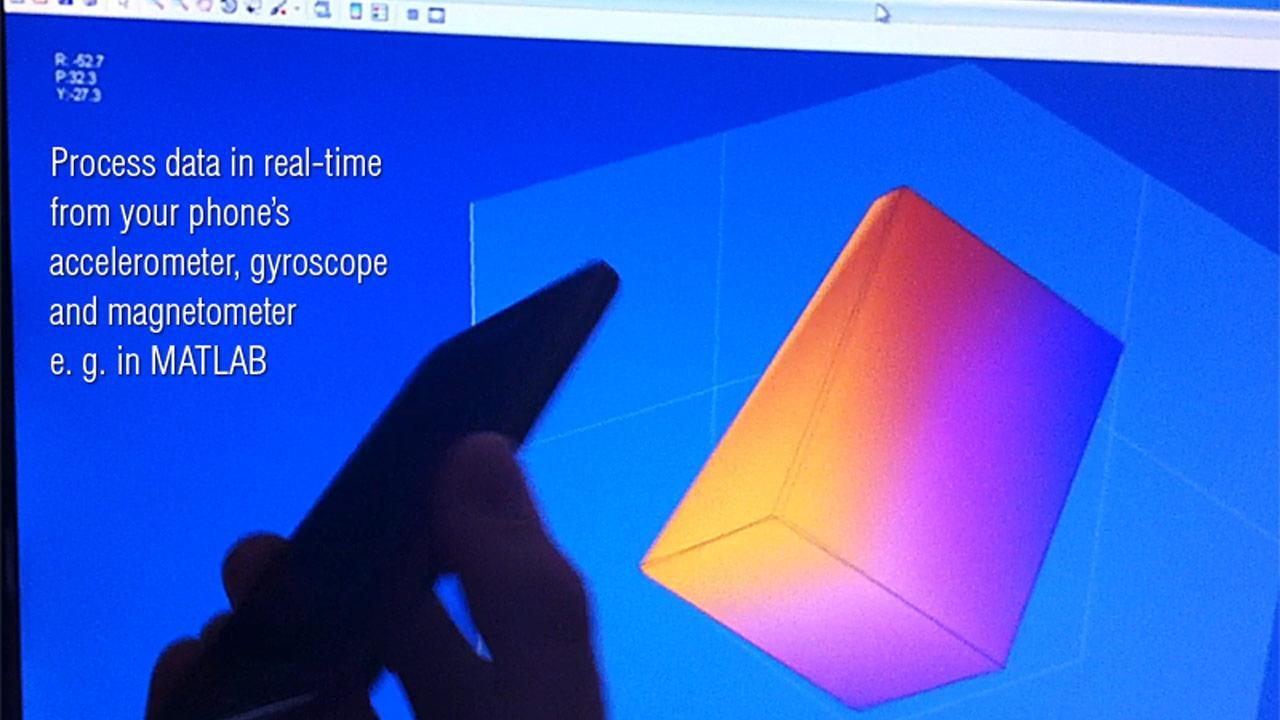
サンプルビデオでは、ストリームはKalmanフィルタリング用のMATLABスクリプトによって直接処理されます。しかし、それはあなた次第、あなたがデータで何をするかです。
次のPythonスクリプトを使用すると、携帯電話からUDPデータストリームをキャプチャできます。
#---------------------------------------------------------------------
ソケット、トレースバックのインポート
host = ''
ポート= 5555
s = socket.socket(socket.af_inet、socket.sock_dgram)
s.setsockopt(socket.sol_socket、socket.so_reuseaddr、1)
s.setsockopt(socket.sol_socket、socket.so_broadcast、1)
S.Bind((ホスト、ポート))
一方:
試す:
メッセージ、アドレス= s.recvfrom(8192)
メッセージを印刷します
を除いて(keyboardinterrupt、systemexit):
上げる
を除外する:
traceback.print_exc()
#---------------------------------------------------------------------
最新バージョン1.2の新しいもの
2015年10月17日に最終更新 - 画面回転の問題が修正されました
- バグ修正(アプリはデータを送信していませんでした)