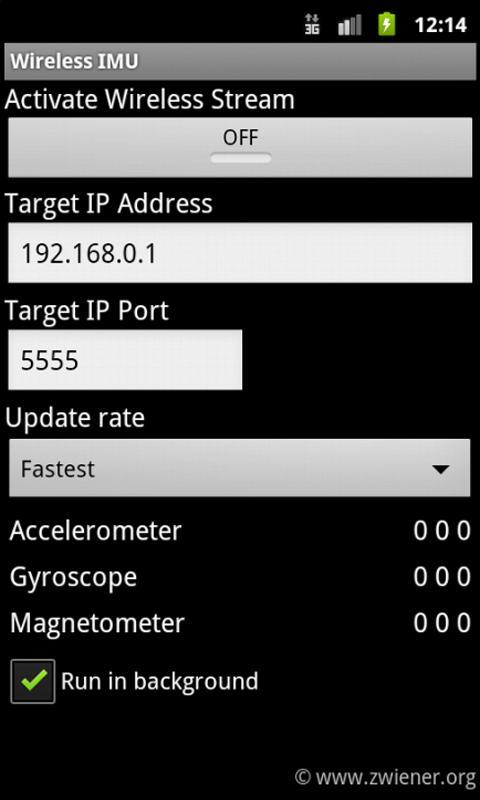
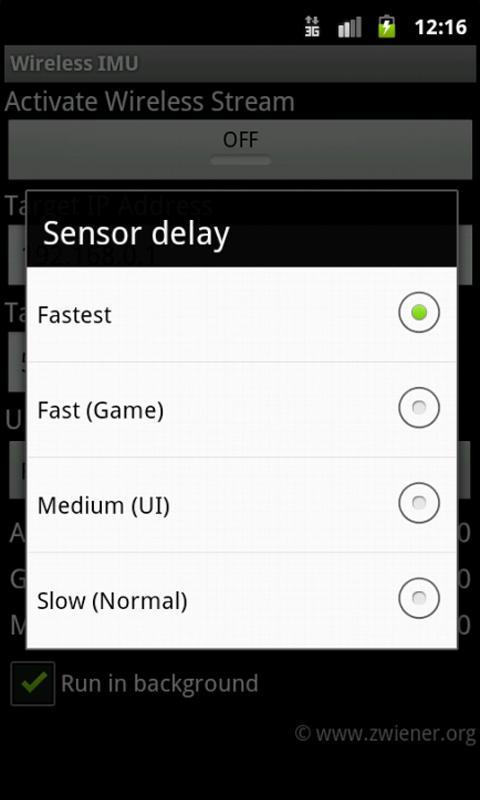
Превратите свой смартфон в беспроводную инерционную измерительную единицу (IMU).
Это приложение отправляет измерения из инерционных датчиков вашего телефона через UDP в качестве CSV (разделенные запятые значения) на компьютер в вашей сети.
Это превращает ваш телефон в беспроводную инерционную единицу измерения (IMU).
Поддерживаются следующие датчики:
- Акселерометр
- Гироскоп
- магнитометр
Если у вашего телефона нет всех этих датчиков, передаются только доступные данные датчика.
Пример UDP Packet:
890,71558, 3, 0,076, 9,809, 0,565, 4, -0,559, 0,032, -0,134, 5, -21,660, -36,960, -28,140
TimeStamp [Sec], Sensorid, X, Y, Z, Sensorid, X, Y, Z, Sensorid, X, Y, Z
Идентификатор датчика:
3 - Акселерометр (м/с^2)
4 - Гироскоп (рад/с)
5 - Магнитометр (Micro -Tesla UT)
Вы можете запустить это приложение в фоновом режиме.
Появляется предупреждающий диалог, если вы не подключены к сети Wi -Fi.
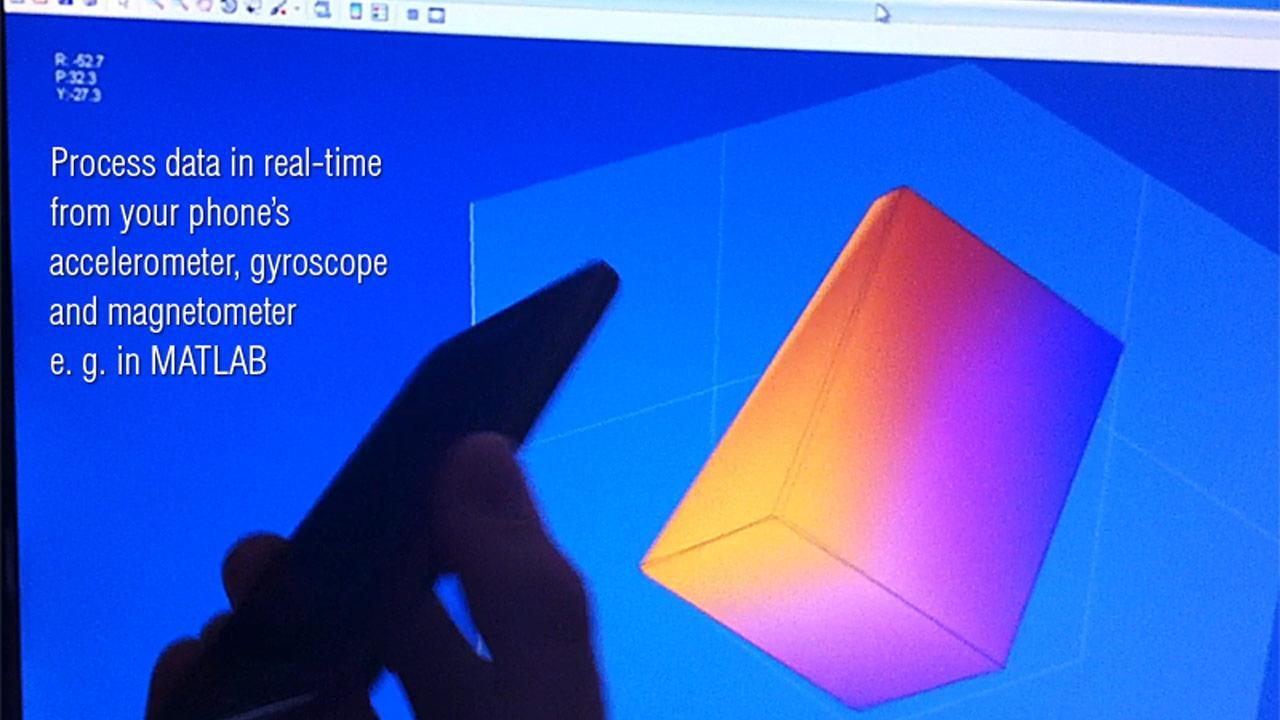
В примере видео поток напрямую обрабатывается сценарием Matlab для фильтрации Калмана. Но это зависит от вас, что вы делаете с данными.
С помощью следующего скрипта Python вы можете захватить поток данных UDP с вашего телефона:
# -------------------------------------------------------
Импорт розетка, трассировка
host = ''
Порт = 5555
s = socket.socket (socket.af_inet, socket.sock_dgram)
s.setsockopt (socket.sol_socket, socket.so_reuseaddr, 1)
s.setsockopt (socket.sol_socket, socket.so_broadcast, 1)
S.Bind ((хост, порт))
Пока 1:
пытаться:
Сообщение, Адрес = S.RecvFrom (8192)
печатное сообщение
кроме (keyboardintrupt, SystemExit):
поднимать
кроме:
traceback.print_exc ()
# -------------------------------------------------------
Что нового в последней версии 1.2
Последнее обновление 17 октября 2015 года - проблема ротации экрана исправлена
- Исправление ошибки (приложение не отправляло данные)